



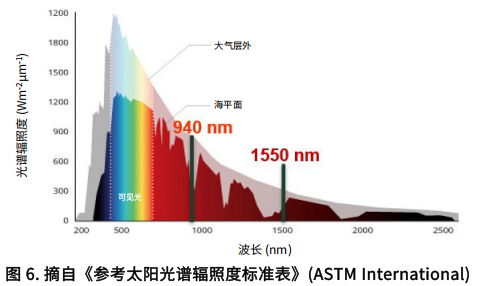
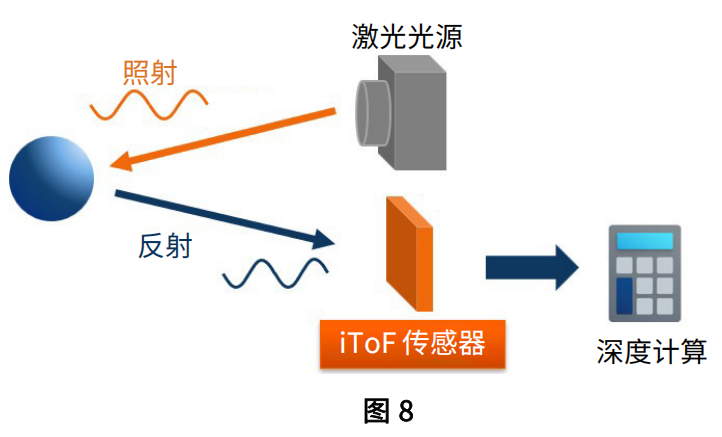
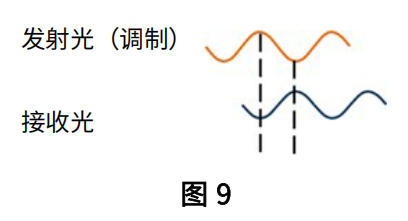
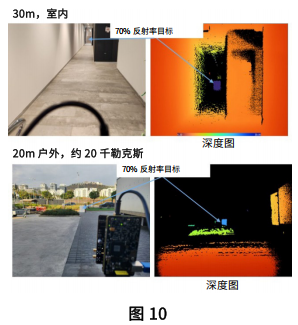
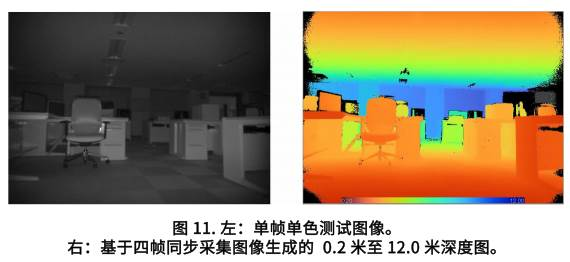
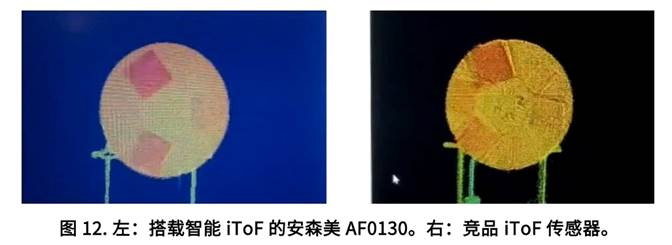
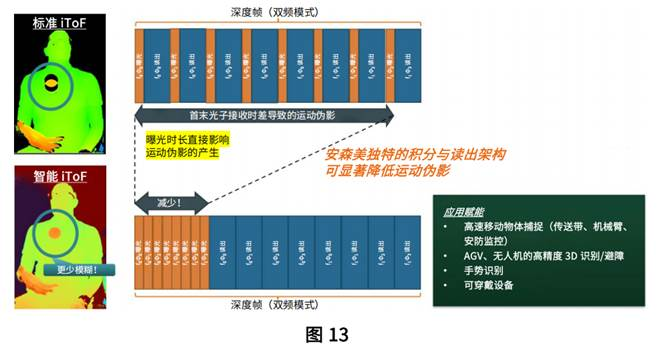
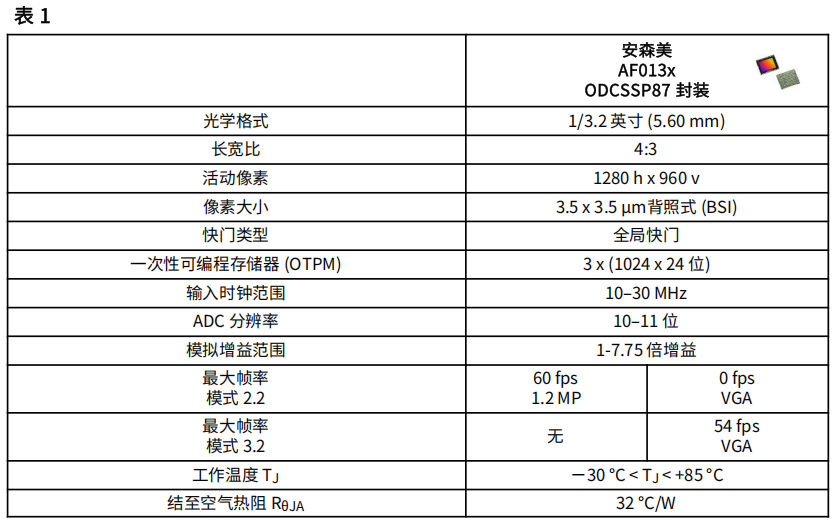
从“扫描”到“洞察”:Hyperlux ID iToF技能怎样霸占30米测距极限 发布时间:2026-04-08 来历:转载 责任编纂:lily 【导读】跟着人工智能技能的普和,体系对于情况深度信息的精度、速率及靠得住性提出了更高要求。传统图象传感器易孕育发生光晕、拖影及运动恍惚等伪影,而激光雷达虽能实现远间隔测距,却于分辩率及全视场笼罩上存于局限。是以,为详细运用遴选适合的深度感知技能,成为工程师面对的焦点挑战。本文将切磋安森美(onsemi)推出的Hyperlux ID间接飞行时间(iToF)深度传感器怎样经由过程立异技能,于中短间隔运用场景中实现高精度、高靠得住性的深度感知,助力呆板“看清”世界。 对于呆板视觉而言,要实现这类感知级另外辨认能力,绝非易事。 当呆板履行物体操作或者计划前方路径时,其处置惩罚器需要于极短期内获取尽可能多的深度数据点。传统图象传感器会孕育发生年夜量数字伪影,包括光晕、拖影、过饱及以和运动恍惚。这些伪影并不是真正的情况信息,假如缺少深度感知功效和深度数据的有用解析手腕,呆板的处置惩罚器将没法做出正确揣度。咱们当然可以寄但愿在人工智能或者呆板进修算法,助力呆板区别真实场景与虚伪滋扰。但这里真正需要的是一款机能强盛且不变靠得住的深度传感器,从而让呆板无需再从不成靠的视觉证据中去推测真实场景。 本白皮书旨于切磋怎样为详细运用遴选适合的深度传感器。作为全世界领先的半导体器件制造商之一,安森美出产各种传感器装备,包括基在CMOS的图象传感器、超声波传感器、短波红外(SWIR)传感器以和激光雷达。 正如本白皮书[PDF]中所论述,激光雷达之以是能实现远间隔深度感知,是由于它采用了直接飞行时间(dToF)技能。当运用场景中最要害的数据需求是及时测距时,dToF技能能为激光雷达提供优在其他深度感知要领的收罗速度,并具有检测激光回波路径中多个物体的能力。经由过程采用二维单光子雪崩二极管(SPAD)及硅光电倍增管阵列(SiPM)技能,安森美激光雷达组件可以或许探测最远300米规模内的单光子旌旗灯号。 然而激光雷达于分辩率方面存于局限。为实现全视场笼罩,激光雷达需对于前方场景举行扫描,就像用画笔于整个画布上慢慢涂绘同样。这类方式难以辨认远方物体的特性,特别于物体边沿轮廓不敷清楚时,这一问题更为凸起。 开发将来呆板视觉运用的工程师需要充实相识各种技能的差异,从而为自身的研发事情选择适合的成像装备。 当呆板视觉体系检测到其感知规模内存于物体时,它不仅需要判定物体的间隔,还有需揣度物体的外形与布局。这要求体系经由过程更高密度的数据点收罗,获取前方场景的更大都据,以实现更高的分辩率及保真度。例如: 工业安防体系聚焦年夜门或者特定进口,探测约10米半径内的挪动物体或者勾当迹象。 视频集会体系拍摄画面内的人物,当人物起身于室内走动时,体系会主动调解构图与对于焦。 堆栈及物流中央的库存治理体系连续核验货物库存数目和其存储位置。 工场检测体系对于零部件不间断检测,排查潜于瑕疵及缺陷。 物流体系对于货物及包裹举行常态化尺寸丈量,以优化运输方案并晋升运输安全性。 车辆装载体系连续不停地将库存货架上的货物转移到运输车辆上。 此类运用场景均需要高分辩率深度传感器来辨认前方的物体,并辅助软件揣度抓取、搬运或者操作物体的最优方案。经由过程物体的形状或者布局判定其属性,离不开深度感知技能的撑持。这项使命的难点于在,图象仍是二维平面信息。但借助一些技能手腕,可从二维数据中推导三维空间信息。安森美最新推出的Hyperlux ID iToF深度传感器,便集成为了这种前沿技能。 安森美技能延长浏览 合用在汽车、物流等范畴的远间隔测距激光雷达组件。 面向主动驾驶车辆的进步前辈立体3D传感技能。 用在主动驾驶和驾驶辅助车辆的超声波传感器,可辅助车辆规避障碍物(含停车场景)。 合用在各类工业运用的Hyperlux CMOS图象传感器,具有高动态规模及优秀的低光机能。 深度感知的技能难题 间隔属在一维空间观点。激光束的特征刚好表现了一维空间感知方式的全数上风与局限。对于在以激光束作为感知机制的装备而言,要确定传感器前方的情况组成,就必需经由过程屡次扫描并整合扫描所患上的数据来实现。只管技能成长正不停加速这一扫描历程,但此类装备仍旧存于物理限定。 实现深度感知至少需要一张二维图象,而若能得到两张和以上二维图象,则可揣度出三维信息。具有深度感知功效的图象传感器,其有用感知规模受限在传感器自身的分辩率。而激光束则不存于这一局限。咱们可以为近地轨道(LEO)卫星搭载激光雷达装备,从上千千米高空对于地表地形与海平面举行精准测绘。 恰是这一素质区分,界定了激光雷达与图象传感器于工业运用中的差别合用范畴。如今,一样平常糊口中愈来愈多的主动化装备,最先采用基在CMOS的图象传感器来实现深度感知功效。于已往,基在CMOS的传感器其实不合用在消费级数码相机,特别是专业摄影范畴。这种传感器对于光学噪声及电磁滋扰十分敏感,而初期数码相机所采用的电荷耦合器件(CCD),则能很好地解决这两年夜问题。 智能手机时代的到来完全转变了这一场合排场。业界借助NASA喷气推进试验室为航天项目研发的相干技能,优化了CMOS传感器的能效体现与现实运用价值。如今,安森美基在CMOS的Hyperlux ID AF0130及AF0131传感器,比拟CCD图象传感器与激光雷达组件,揭示出多方面上风,详细以下: 能效更高,合用在需要低直流电压或者电池供电的运用场景。 更容易集成到呆板设计与组件封装中。 热特征年夜幅优化,无需自动散热体系。相较之下,激光雷达的光电探测器对于温度尤为敏感,特别于35℃或者以上情况中。 深度感知精度极高,依托120万像素(MP)分辩率及违照式(BSI)技能,联合传感器内置的图象处置惩罚能力,可显著晋升感知精度。 图象暴光速率更快,经由过程优化传感器的图象旌旗灯号处置惩罚、存储和读取方式,实现更快的暴光效率。 可编程性更强,撑持经由过程情景感知功效对于图象传感器举行微调,使其更好地适配详细运用需求。 激光雷达及直接飞行时间 如您所知,激光雷达是将雷达道理运用在光波范畴的技能。它经由过程阐发物体反射的光波波形,丈量激光发射点与被测物体之间的深度及间隔。于地质勘探及卫星遥感到用中,激光雷达凡是依赖GPS来实现切确定位。该技能的事情道理与声呐颇为相似:声呐经由过程捕获反射的声波来测算发射器与物体的间隔,而激光雷达则将激光脉冲与雷达道理相联合来完成测距。 于各种激光雷达组件中,固态SiPM的功耗最低,同时还有具有极强的抗电磁滋扰与抗光学噪声能力。即即是于60米外、反射率仅约10%的未授权挪动物体,也能被它容易辨认;这一特征可为安防体系预留足够的相应时间,和时封锁进口并发出警报。 上图展示了太阳辐射于地球年夜气层内(深色)与年夜气层外(淡色)被探测到的光子相对于数目。不雅察图表可以发明,跟着波长增长,于近红外(NIR)波段的905nm与940nm处,以和短波红外(SWIR)波段的1550nm处,光子数目均呈现了断崖式降落。太阳光中这些波段的光子占比极低,是以很是合适用在激光雷达。安森美年夜大都客户的运用场景均集中于905-940nm波段,该波段同时也是激光雷达高性价比组件的重要笼罩区间。 当运用场景仅需经由过程光波判定远处是否存于物体时,单点深度感知方案具备显著实用性与高效性。景象形象学家或者地质学家可能会存眷激光雷达反射波的光谱阐发能力,而于一样平常工业运用中,当体系仅需判定前方有没有物体这类二元状况时,SiPM无疑是光传感器件的精彩选择。 安森美技能延长浏览 •激光雷达于工业测距范畴的运用 •SiPM dToF激光雷达平台入门指南[PDF] •视频:第三代SiPM激光雷达演示体系室内测试 •视频:高分辩率短波红外(SWIR)成像技能 Hyperlux ID与间接飞行时间技能 基在CMOS的图象传感器于深度感知规模上存于局限,其无歧义测距规模于通例前提下受限在单次光调制周期。该上限阈值Dmax的计较公式以下: 此中,常数c代表光速,fm代表调制光频率。例如,假如传感器采用60MHz的单频调制方案,其无歧义测距规模上限仅为2.5米。 Hyperlux ID专为工场车间及包装流水线等场景设计。于这种场景中,呆板人体系需要精准丈量机械臂与食物等易损物料外貌之间的间隔。 于上述运用情况中,采用间接飞行时间技能举行深度丈量,会更简洁、更具实用性。与激光雷达近似,iToF技能一样会比力反射光与发射光,但区分于在,iToF经由过程推导计较来获取间隔信息。Hyperlux ID以940nm红外激光二极管作为光源,借助全局快门技能,一次性完成所有入射光的收罗。相较之下,卷帘快门的事情方式是自上而下逐行暴光传感器,近似在传统的机械焦平面快门。这类快门模式虽能满意消费级数码相机的利用需求,但即即是iToF技能,也没法彻底填补卷帘快门的机能缺陷。 Hyperlux ID的全局快门技能撑持同时完成八次暴光(两种频率各对于应四个相位),并将所有暴光数据整合存储为单帧图象。如许可以险些彻底消弭运动引起的相位偏差。 当激光等恒定调制光源发出的光芒经物体反射后,反射光与发射光之间会孕育发生微小的相位差。传感器经由过程相位差的巨细来判定物体的间隔,但详细间隔数值需要经由过程数学运算推导患上出。详细而言,经由过程评估反射光于0°、90°、180°及270°四个象限边沿处的波幅,计较出吸收光波与调制光波之间的相位差。该相位差∆Φ可经由过程如下双参数横竖切公式计较患上出: 于相位差∆Φ、激光调制频率fm及光速c均为已经知值的环境下,计较每一个采样点的间隔d就会变患上十分简朴,以下所示: 以上即是间接飞行时间技能从包罗相位偏移的图象数据中推导间隔数据的要领。该技能之以是合用在深度感知运用,是由于其经由过程全局快门实现了相位数据的并行收罗,而不是经由过程挪动激光器举行串行扫描。不外,利用单个调制器时,iToF技能仅合用在极短间隔的丈量。安森美经由过程一项名为智能iToF的立异专利技能,于必然水平上降服了这些限定。 安森美技能延长浏览 •高速全局快门图象传感器怎样降低AI视觉体系的运行负荷 •借助技能前进霸占间接飞行时间技能今朝面对的挑战 •视频:为差别运用遴选适合的图象传感器 Hyperlux ID联合智能iToF技能怎样霸占现实运用挑战 Hyperlux ID是一款基在iToF技能实现深度信息感知的图象传感器,是以属在深度传感器。与垂直腔面发射激光器(VCSEL)等自动照明体系相联合,Hyperlux ID可以或许同时计较VCSEL激光与自身发射光的反射光的相位偏移,并于该历程中对于两种光源的光强举行调制处置惩罚。经由过程于单次暴光时间内切换两种差别的频率,传感器的无歧义测距上限Dmax患上以晋升,其计较方式采用了更小的分母参数——详细而言,就是这两种频率的最至公约数(GCD): 于安森美评估套件的测试中,AF0130体现优秀:于荧光灯照明的淡色中性色调走廊情况下,可清楚辨认30米处反射率为70%的方针物体;于雾霾气候的暗影情况中,即便光照强度高达20,000勒克斯,仍能清楚辨认20米处的同规格方针物体。于上方伪彩色深度图中,图象的色采与反射物体的年夜致间隔相对于应。 更精准的深度计较方案 AF0130内置嵌入式深度处置惩罚ASIC,可于片上处置惩罚所有深度感知运算。对于在偏向在利用自研深度处置惩罚算法的客户,安森美提供了AF0131。实在时处置惩罚功效可以让深度数据即时投入运用,满意呆板人定位与运动节制、避障、安防预警及人体手势辨认等功效的需求。 为提高妙度计较精度,智能iToF技能经由过程四帧自力收罗的图象(每一帧对于应波形的一个90度相位),估算每一个像素的反射率。借助这些反射率数据,AF0130可以或许将四帧图象的数据整合为一帧,天生深度图。 对于在深度图中的每一个给定点,像素相应均与该给定点处物体的反射率相干,反射率Rpix可经由过程如下公式计较: 此中,ρ代表像素反射率,D代表图象传感器与该像素之间的间隔,而A代表该点遭到的情况光强度。物体的反射率反应了物体孕育发生的光旌旗灯号强度。可视化软件可以或许以颜色来暗示相对于深度——较近的物体位在光谱中倾向红色的区域,较远的物体则位在光谱另外一真个蓝紫色区域。 强光情况下的高精度深度感知 情况光过强会致使像素吸收的深度旌旗灯号饱及甚至彻底掉效,这是iToF深度传感技能的一年夜痛点。当传感器前方的场景处在强光照射下时(例如工业装置车间情况),所有图象传感器,特别是采用iToF技能的CMOS图象传感器,其判定深度与间隔的难度都将显著增长。 要减弱情况光的影响,需采用情况光按捺的图象处置惩罚技能。该技能巧妙应用光学道理与波长调制要领,将光学旌旗灯号视为声学旌旗灯号举行处置惩罚,从而降服物体外貌光旌旗灯号过饱及的问题。情况光过强会给间隔与反射率的丈量带来诸多挑战,而Hyperlux ID则经由过程两种方式降服了这些挑战:一是于切合人眼安全尺度的条件下优化照明功率;二是调治积分时间,即于设定的丈量周期内,矫捷调解传感器的光积份量。 消弭运动伪影 采用iToF技能的CMOS图象传感器,面对的另外一年夜挑战是消弭运动伪影。运动伪影指传感器于试图捕获运动物体时,图象中呈现的掉真或者不真正的元素。于平凡CCD数码相机中,高速运动的物体于画面中会出现为恍惚影像。因为胶片相机也会孕育发生近似的恍惚效果,这类征象常被视为摄影的固有特征,甚至被用作艺术体现伎俩。 对于在高速光电探测器而言,这种本应体现为恍惚的影像(例如扭转的螺旋桨叶片,或者传送带另外一侧高速运转的机械臂),可能出现为悬浮于空中的独特虚影。这些虚影并不是真什物体,是以需要图象处置惩罚单位将其辨认并纰漏。 AF0130的伪影赔偿始在其全局快门技能,该技能可以让传感器的所有像素同时暴光。 为了测试这类智能iToF技能的有用性,安森美开展了一项测试:利用一个装有三块差别厚度木块的扭转轮盘(木块颜色越深则厚度越年夜)举行成像。于竞品传感器拍摄的画面中,轮盘上始终出现出六块木块的影像——这是传感器受情况光等因素影响,与光芒发生异样作用而孕育发生的光学错觉。比拟之下,AF0130拍摄的视频虽也存于稍微的光学错觉,但其每一一帧画面中仅显示三块木块,只是木块会呈现位置小幅偏移及瓜代闪耀换位的征象。AF0130拍摄的每一一帧画面都越发切近真实场景,基在这些画面天生的深度图,精度也远高在竞品。 成像体系的典型帧暴光处置惩罚流程是,先将暴光数据写入存储器,然后分配时间履行读出阶段。读出阶段的使命是,将传感器收罗到的像素值依次数字化并存储到存储器中。平凡图象传感器被设定为暴光后当即最先读出阶段。假如传感器需要对于持续八帧图象反复此历程,那末暴光距离将过年夜,致使深度图各部门数据没法正确匹配。这个问题会致使图象中呈现年夜量运动伪影,对于在忙碌的都会街道或者装置线传送带等现实运用场景而言,这是不成接管的。 AF0130搭载的智能iToF技能经由过程先持续完成八帧暴光,再同一履行所有帧的读出操作,降服了这一挑战。这一设计年夜年夜削减了运动恍惚征象,显著晋升了手势辨认体系的靠得住性,这种体系需要正确区别具备指令意义的手臂动作与恍惚虚影。(各帧暴光之间仍存于微小的时间距离,但这些距离短到足以纰漏不计。) 如下是AF0130典型暴光场景的计较历程:120万像素传感器的尺度成像帧率约为29.97帧/秒;于MIPI存储总线单通道吞吐量为1.2Gbps的前提下,其最优暴光时间(首光子到末光子的相应速率)为300µs。存储帧中每一个像素为12位,是以,当两条MIPI路线同时事情时,吞吐量应该约为2亿像素/秒。 一张120万像素的图象包罗1280×960个像素,是以该图象的读出耗时为6.1ms。Hyperlux AF0130可于初次读出阶段最先前,将所有暴光数据存储于传感器内。相较之下,竞品传感器会于前四帧之间穿插履行三次读出操作,是以其首光子到末光子的相应速率为0.3ms×4+6.1ms×3=19.2ms。 相较之下,AF0130首光子到末光子的相应速率为0.3ms×4+0.25ms×3=2ms。依附这一简朴的流程调解,AF0130于29.97fps帧率下,运动机能到达了竞品的9.6倍。 再看另外一种运用场景:假定帧率晋升至约60fps。为撑持深度处置惩罚,每一个MIPI通道的吞吐量需要到达2Gbps(此处假设该前提具有可行性)。于该吞吐量下,传感器的像素处置惩罚能力可达3.33亿像素/秒,单帧图象的读出耗时为3.7ms。AF0130首光子到末光子的相应速率为0.1ms×4+0.25ms×3=1.15ms。而竞品传感器的这一数值为0.1ms×4+3.7ms×3=11.5ms。这象征着,安森美Hyperlux ID系传记感器于60fps的帧率下,运动机能到达了竞品的10倍。 使用情景配置实现矫捷适配与微调 经由过程校准Hyperlux ID的全局快门,可以针对于特定运用对于这款图象传感器举行微调。例如,假如传感器需适配仅两米外的传送带场景,则可以将AF013x校准为聚焦在四米规模内的反射光旌旗灯号。这种用在微调传感器事情特征的参数规格可以作为情景配置存储于传感器当地。如许一来,当运用场景发生变化时,只需切换利用对于应的情景配置便可。 AF013x还有具有动态调解能力。例如,当反射物体间隔过近,致使暴光强渡过高、图象细节丢掉时,AF013x可主动缩短暴光时间;或者者,假如全局快门原本针对于远间隔探测设定,而近处有物体进入画面,动态情景切换功效可以让传感器当即重置参数,防止近处物体于画面中出现为年夜片恍惚虚影。这一功效于安防监控场景中尤为实用:例如,传感器凡是针对于10米外的年夜门举行参数调校,但仍能清楚捕获于2米处进入画面的挪动物体(即即是高速挪动物体)。 降低体系繁杂度与成本 对于在采用iToF技能的尺度单调制器图象传感器而言,深度感知的相干算法凡是需要由外置微节制器或者FPGA阵列来处置惩罚。而Hyperlux ID AF0130将这些功效直接集成到芯片内部,使组件设计再也不需要如下外置器件: •片外微节制器或者FPGA阵列(这种器件需要自力的电源树及电压轨)。 •帧存储单位(凡是需要存储器节制器)。 •用在毗连图象传感器、微节制器及存储器的高速接口。 将深度处置惩罚功效集成到图象传感器内,不仅能降低体系带宽占用与算力需求,还有可简化搭载该传感器的组件设计、缩小组件尺寸,并降低组件的出产制造成本与运维成本。 安森美技能延长浏览 •合用在AF0130及AF0131的AGB1NOCS-GEVK评估板 •视频:间接飞行时间技能的进展 Hyperlux ID量化成果 安森美Hyperlux ID AF0130与AF0131深度传感器所实现的技能冲破,可以重塑工业呆板视觉组件的设计范式,使这种组件更容易在出产制造、维护调养、工程开发,同时具有更高的性价比。 •AF013x搭载的120万像素BSI全局快门,可以使CMOS图象传感器实现超高精度的深度感知能力。 •智能iToF技能与片上存储联合,可削减甚至消弭运动伪影,助力需要高精度呆板视觉的图象与物体辨认体系类AI软件晋升正确性。 •片上集成算法处置惩罚功效,彻底消弭对于外部微节制器的依靠,从而简化组件设计、缩小组件尺寸,同时降低功耗。 •卓着的情况光按捺能力可晋升传感器的无歧义测距规模,从而撑持更广泛的呆板视觉新运用。 •依托安森美行业尺度DevWare X开发情况,可实现开放式软件开发与可编程节制,并撑持自界说情景配置。 技能愿景:迈向真实的呆板视觉 于需要统筹速率与精度、但无需超远间隔感知的场景中,Hyperlux ID解决了呆板视觉技能实用化与适配难题。现代呆板需要“看清”本身的动作,只需于要害微秒内获取相干的深度与空间数据。曾经几什么时候,低功耗CMOS技能因易受温度与噪声滋扰,其实不合用在这种运用场景。但如今,跟着工程设计的改良与编程技能的优化,CMOS技能不仅降服了自身的短板,更于机能上逾越了CCD等传统技能。 跟着呆板视觉技能逐渐成为各种时空感知装备的标配功效,工业装备也亟需于技能机能、靠得住性、供给链不变性与技能撑持办事上均能满意范围化运用需求的图象传感器。安森美提供的元器件产物,正致力在鞭策呆板视觉生态朝着更简便、更高效的标的目的成长。 









地址:长春净月高新技术产业开发区百合街1009号
版权所有:半岛(bandao·中国)官方网站-BANDAO SPORTS信息技术股份有限公司
电话:0431-85861717/ 4001182299




 吉公网安备 22010202000255号
吉公网安备 22010202000255号